平台热线
平台热线



ABB机器人Robot WebService2.0测试
1.RWS(RobotWebService)是ABB机器人提供的方便访问机器人控制器的Web接口。它可以通过向特定URL提交数据而获得所需的返回数据,也可以通过post方法提交数据。请参阅网页中的机器人变量并设置。
2.ABB机器人逐渐从Robotware6.0时代转向Robotware7.0时代。目前IRB1100、CRB1100、IRB1300、IRB910INV、单臂Yumi、GOFA协作机器人均采用Robotware7(以上机器人只能使用omnicore控制器,即只能使用rw7,不能使用rw6)
从3.Robotware7开始,ABB机器人使用RWS2.0。RWS2.0和1.0的主要区别在于URL使用HTTPS来提高安全性。同时,在向URL提交时,需要添加Headers,如application/xhtml+xml;v=2.0的Headers可以返回xml格式数据,添加application/hal+json;v=2.0的Headers,返回json格式数据。
4.关于RWS2.0的介绍,请参见https://developercenter.robotstudio.com/api/RWSurls.primaryname=Introduction。
5.因此,在测试RWS2.0时,URL不能简单地直接输入到浏览器中。此时,由于没有添加Headers,会出现错误。
6.Postman软件或插件可用于方便测试。
7.Postman是一种非常流行的API调试工具。事实上,开发人员使用更多。因为测试人员会有更多的接口测试选择,如Jmeter、soapUI等。但是,Postman对于在开发过程中调试界面来说是非常简单、非常强大的。
8.可以在网上搜索Postman的Chrome浏览器插件。出于一个已知的原因,这个插件无法直接从Chrome商店获得。以下连接介绍了相关插件的安装方法:https://blog.csdn.net/qq_33183456/article/details/105024980。
9.打开robotstudio,创建机器人系统(使用rw7)
10.例如,要获取机器人控制器信息(版本、选项)等,可以打开Chrome浏览器,打开Postman插件,并在URL处填写https://127.0.0.1:80/rw/system,添加Headers为Accept,value为application/xhtml+xml;v=2.0。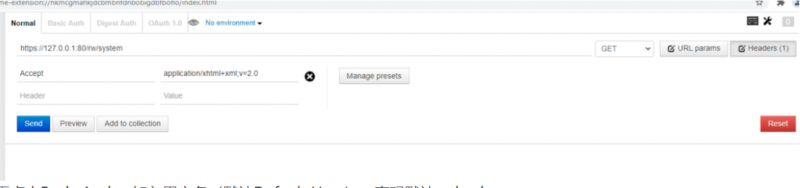
点击Basicauth,添加用户名(默认Defaultuser),默认密码robotics。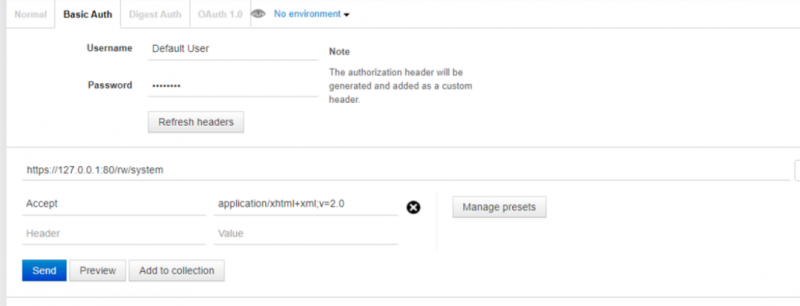
此时点击Send获取xml格式机器人系统信息。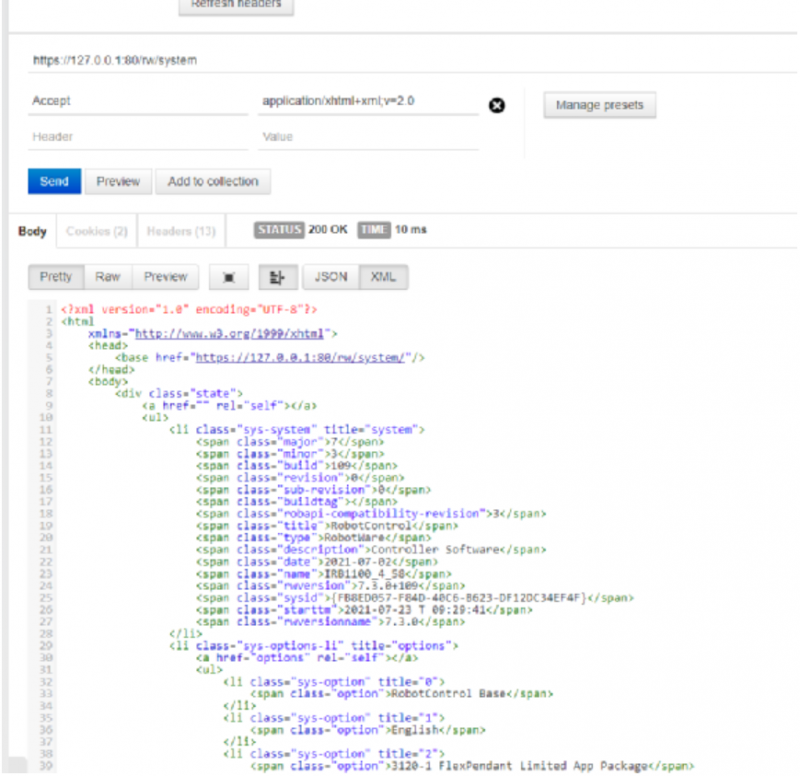
如果Headers的value是application/hal+json;v=2.0,返回json格式数据。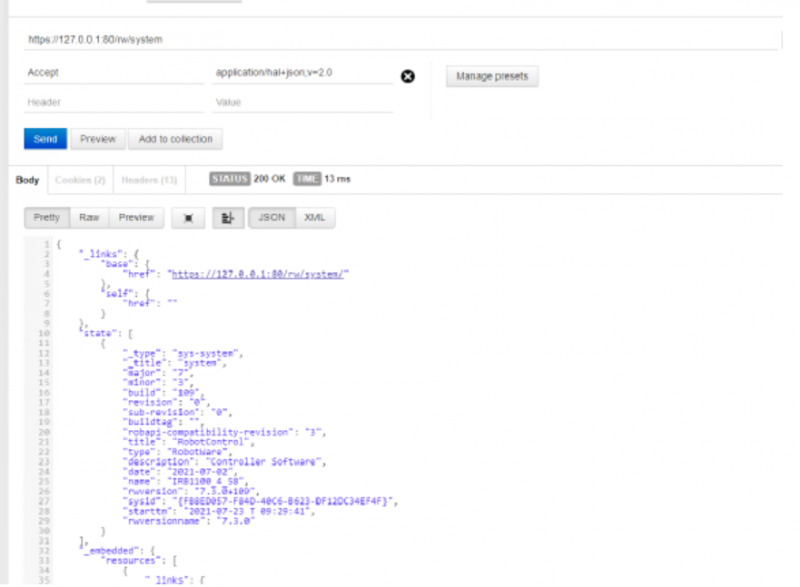
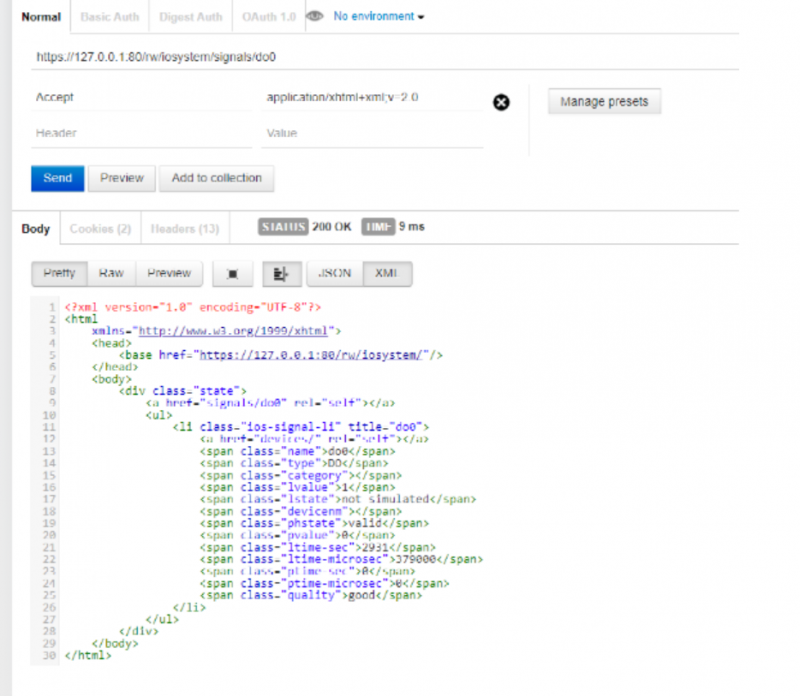
11.例如,如果您想获得信号do0(已在机器人系统中创建),可以输入URL:https://127.0.0.1:80/rw/iosystem/signals/do0,当前do0值为1。