 平台热线
平台热线



ABB机器人:Cross Connection功能介绍与使用方法
ABB机器人的Cross Connection功能,是指单个或多个数字量I/O信号(DO、DI)或组信号(GO、GI)通过逻辑运算来控制另外的数字量I/O信号。此功能相当于一个简单的PLC,机器人可以通过使用此功能来监视与控制外部设备的运行。
Cross Connection功能能够实现的逻辑运算较为简单,主要包括逻辑与运算(And)、逻辑或(Or)运算以及信号取反运算。与机器人程序后台运行功能一样,Cross Connection功能也是后台运行的,也就说Cross Connection功能中的信号逻辑运算是独立于机器人RAPID程序以外单独执行的,它不受机器人RAPID程序扫描周期的影响。因此,使用Cross Connection功能除了可以避免编写大量的RAPID程序代码以外,还可以降低RAPID程序的运行周期,同时增强信号监视与控制的实时性,提高信号处理速度。
功能使用注意事项
1.如果在逻辑运算语句中使用了两个以上的执行I/O信号,那么Cross Connection功能将按照从左到右的顺序依次运算。
2.同一条逻辑运算语句中,不建议混用And和Or运算关系,否则会产生不可预知的错误。
3.ABB机器人Cross Connection功能支持创建300条逻辑运算语句,每条逻辑运算语句***多能够处理5个输入条件I/O信号。若需处理更多I/O信号,则需要使用多条逻辑运算语句。
4.可将一条逻辑运算语句的输出结果作为另一条逻辑运算语句的执行条件,而后者的运算结果还可以作为下一条逻辑运算语句的执行条件,依次向下连接,这种连接的深度***多不能超过20层。
5.信号逻辑运算语句不得出现环形闭合链接,否则会导致无限次求值的死循环,***终导致机器人主控计算机死机。
6.Cross Connection功能中不得出现多条逻辑运算得出同一I/O信号的语句,否则机器人会出现不可以预知的错误。
7.使用设备物理I/O信号作为运算信号的情况下,运算I/O信号也要与物理I/O信号保持正确的映射关系,否则机器人会出现不可以预知的错误。
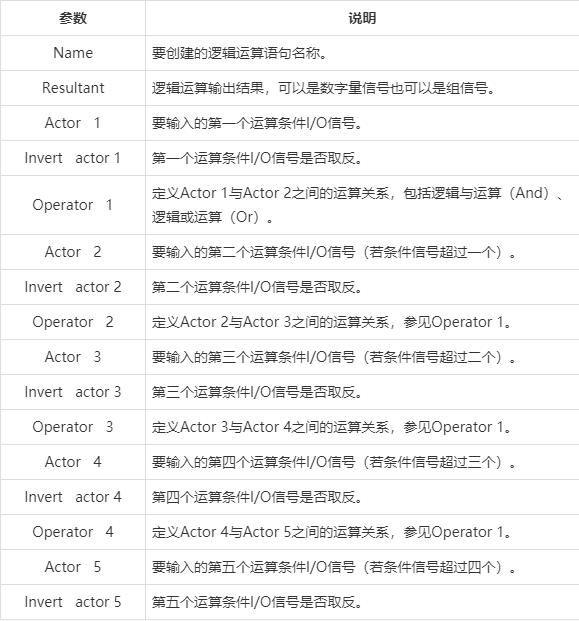
功能配置参数说明
在ABB机器人中使用Cross Connection功能创建I/O信号逻辑处理语句与PLC不同,它不是按照IEC61131-3标准中规定的5大标准程序语言编写的,而是有自己的编写方法。下表是ABB机器人编写Cross Connection功能I/O信号逻辑处理语句的关键词及其含义。
我公司配有ABB、KUKA、FANUC、安川等**机器人,以及机器人备件,确保备件到客户手里100%能够使用。并凭借多年项目及现场服务经验提供机器人故障紧急现场抢修、备件维修、 备件供应(如电机、减速机、驱动单元、电源模块、主计算机、控制柜各种板卡及模块、原装线缆及柔性电缆线束等)、系统集成、系统改造、预防性保养检测、年度安心服务等,为您的机器人健康保驾护航。

